Table of Contents
PhotoTrack Instruction Manual

Installation and Calibration
The PhotoTrack quadrant photomultiplier (PMT) is a C-mount device where the photo-cathode of the PMT is located at the C-mount image plane. The PMT may be attached to any microscope C-mount and be correctly positioned, however it is more common to interpose a photo-port beam splitter so that the instrument can be used with the data-recording camera. The ASI Photoport Beam Splitter works with most inverted microscopes to provide two direct C-mount ports at the microscopes design location. The splitter uses a 36.0 x 25.5 x 1.1 mm plate beam-splitter, which is the common size for most Zeiss filter cubes. Either partially silvered mirrors or dichroic beam splitters can be used in the splitter depending upon the application.

Choice of beam splitter and filters in the Photoport Beam Splitter will depend upon the experiment design. The filters are easily changed out as indicated in the photos below.


The PhotoTrack module should be mounted on the scope such that stage motion translates into rectilinear motion at the camera and PhotoTrack unit.
Spotting Scope Installation
The PhotoTrack system is often used in conjunction with a second, low-power microscope used to initially find and position the organism to be tracked.

The figure above shows a typical installation. The spotting scope consists of a simple right-angle microscope body attached to a dovetail slide and focusing actuator. The entire apparatus is attached to the ASI XY stage. The figures below illustrate the installation procedure.


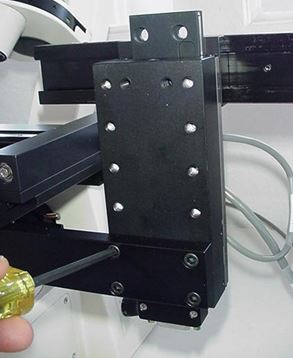
The right-angle microscope is connected to the dovetail slide with an intermediate bracket that allows for some perpendicular adjustment. The adjustable stop on the dovetail makes it easy to return the scope to the same location after sliding it out of the way for sample preparation.


Spotting Scope Illumination
The spotting scope has 50% beam splitter cube and an adjustable LED epi-illumination source. The LED color and particular blocking filter will be determined by the experiment requirements. The LED may be simply changed out for one the correct color as shown in the figures below. The illuminator uses a 6 to 12VDC wall adapter for power. Illumination level is controlled with the knob.


The LED cathode (flat side) is to the left in the figure. (If the LED does not light, try turning it around.) Best results are obtained if a blocking filter is placed in front of the camera to block the excitation light from the primary microscope. The blocking filter can be placed either in the filter cube (18mm Nikon old style cubes) or in the C-mount in front of the camera (25mm filters). The figures below show a blocking filter being placed in the C-mount and the C-mount/camera assembly being installed on the video microscope.


Connections and Cabling
The MS2000 XY stage should be installed on the microscope as described in accompanying instructions. Special cabling for the PhotoTrack system consists of a straight-through DB9M to DB9F cable between the quadrant PMT and the MS2000 controller. If focus control for the spotting scope is provided by an ASI LS-50 drive, also connect the appropriate 15-pin cable from the LS-50 to the MS2000 Z-drive connector.

PMT Operation
The quadrant PMT has built-in overexposure protection against unintentional non-repetitive exposure to bright light. A red light on the back panel indicates that the over-exposure circuit has tripped and that high voltage to the PMT has been turned off. Press the Reset button on the back panel to re-enable the high voltage. The overexposure circuit will usually trip when the PMT is first powered on.
A ten-turn dial and toggle switch control the high-voltage (gain) to the PMT. The ten-turn dial gives proportional control of the HV to the PMT between 0-900V. The Hamamatsu PMT has a maximum voltage rating of 900V and a recommended working voltage of 800V, which would correspond to about 900 on the dial. Be especially careful about overexposure when running above 800V.

PMT Quadrant Balance
The four PMT quadrants may not have identical sensitivity for a combination or reasons, including typical 30% channel variation in the phototube itself. There are four trim-pots on the back of the quadrant PMT to allow gain trim of each of the four channels. Turn the trimmer full counterclockwise for maximum gain; full clockwise reduces to about 50% of maximum gain.
LCD Display
The bottom line of the LCD display on the MS2000 controller shows information about the signals on the quadrant PMT and state of the tracking system.

The meaning of the quantitative information on the display changes depending up on the system state. In the IDLE (I) state the display shows the raw signals from the four PMT channels. Switching to the MONITOR (M) state grabs the current levels as background and displays the background-corrected values on the LCD. When in the READY (R), PAUSE (P), CALIBRATE (C), BALANCE (B), or ERROR (E) states, the bottom line shows

The X and Y error numbers are determined from the background and balance corrected PMT signals according to
\begin{equation}X_{ERROR} = \frac{X_+ - X_-}{X_+ + X_-}\end{equation} and \begin{equation}X_{ERROR} = \frac{Y_+ - Y_-}{Y_+ + Y_-}\end{equation} where X+, X-, Y+, and Y- are the sum of the appropriate two quadrant channels. The SUM number is the sum of all the background and balance corrected channels, showing the overall signal level being used for positioning.
Illumination Considerations
Tracking it is best accomplished when the tracked spot is well defined compared to background or other interfering optical signals. The PMT aperture and the excitation light field stop can aid in masking unwanted light from the PMT. The diagram at the right illustrates the situation where everything is mapped to the image plane. Stopping down the PMT aperture keeps the spurious light from getting to the PMT. Stopping down the excitation light keeps spurious fluorescence from interfering with the target object. Stops that are too tight will cause tracking difficulties with fast moving organisms. If the tracking target rapidly moves outside the aperture stops without the stage managing to keep up, the target will be lost. There is a compromise that must be determined to have robust tracking and good masking.

PMT Aperture
The iris in the PMT housing is located close to the image plane of the device. The iris has a range of about 25mm when fully open to about <2mm diamter when fully stopped down. Tight stops mean that the iris must be exactly aligned to the center of the PMT structure or else the illuminated areas of the PMT quadrants will not be of a similar size. This effect will show up as excessive gain variation between the quadrants. A good working size seems to be open about half way.

Excitation Aperture
The spot size of the excitation light can also be used to minimize extraneous fluorescence that could confuse the tracking operation. Again, there is a compromise aperture size that is best determined experimentally. The aperture should be well centered on the PMT quadrant centerline or the tracking system may tend to run off in a preferential direction just from background fluorescence. This tendency can be ameliorated using the quadrant balance procedure outlined below.
Z-tracking using PhotoTrack
Starting with Firmware version 9.2e Phototrack now supports Z-axis tracking as well as the usually XY mode. The key to achieving Z tracking with the quadrant 4-pixel photodetector is use the diagonal pixel pairs for the Z information. Left and right pairs are used for X tracking, top and bottom pairs are used for Y tracking and diagonal pairs are used for Z tracking. The shift in diagonal preference with Z-focus can be achieved using the astigmatism created by a cylindrical lens.
Adjusting Quadrant Balance
For optimal performance, the four PMT channels and the light apertures need to be balanced and centered so that the tracking system has no tendency to move the stage when only a uniform background is present. A simple method to electronically balance the PMT quadrants with light from a uniform illumination source is provided with the firmware. This process only needs to be done once as long as the PMT aperture, excitation aperture and PMT gain settings remain fixed. The balance settings can be saved in the controller so the same balance point can be used the next day. Use the following steps to set the PMT balance:
- Set up a typical sample with the desired excitation region set with the excitation lamp condenser iris. Set up the desired PMT aperture (half open is a good place to start). Set the desired PMT gain (800 is a good starting place). Find a fluorescent object that is similar in size and intensity with the object to be tracked.
- Center the fluorescent sample in the field of view. Defocus the sample so fluorescence fills the field of view uniformly.
- Turn on the PMT. Ensure that the controller shows the IDLE tracking state on the bottom line of the controller.
- Block the PMT so that only background signal is registered on the LCD display. Wait 10 seconds to allow a good background average (in the IDLE state). Then press the @ button to grab the background and advance to the MONITOR state.
- Unblock the light so that the PMT is registering the corrected counts on the display.
- Enter the BALANCE state by holding the HOME button down for >8 seconds. The LCD will indicate the ‘B’ state and show uncorrected gradient from the quadrants.
- Wait 10 seconds to allow a good average of the PMT signals. Then press the @ button to grab the balance correction and advance to the READY state. The gradient signals in the ready state should be near zero.
- In the READY state, save the settings to the controller’s flash by holding down the HOME button for >8 sec. The saved info and a summary of the track parameters will be sent to the serial port.
Finding the Quadrant Order and Gain Calibration
A alternate procedure to determine Quad order can be found here
The tracking system requires that the quadrant PMT and the stage have the correct orientation with respect to one another. The quad_order information is saved in a parameter that is used to initialize the system on startup. There is a good chance that the default order setting will not be correct for any particular setup. The firmware has a routine that can be used to find the actual relative orientation of the PMT and stage and assign the quad_order parameter the correct value. This procedure needs only to be done once as long as the physical mounting arrangements are left in place. Use the following steps to obtain the quadrant order and gain calibration:
Quadrant Order
- First set the quadrant balance using the procedure above if you have not already done so.
- The firmware is optimized for doing this procedure with the working objective, typically a 40X to 63X objective. The program will automatically move the stage a short distance (default 0.040mm) set by the Cal_Range parameter of the LOCKRG command. You may want to increase the Cal_Range value if you are using a low power objective.
- Find a fluorescent object that is sufficiently isolated from any neighbors. Manually center the object in the field of view.
- From the IDLE state: turn on the PMT – close off the light – grab a background with a short-press of the @ button. Now in MONITOR state.
- Open the light. From the MONITOR state return to the IDLE state with a long-press (3-6 seconds) of the @ button.
- Start the CALIBRATION mode by pressing the HOME button and holding for >8 seconds and releasing. The program will move the stage around and will eventually come back in either the READY (success) or the ERROR (failure) state. Status of the procedure is displayed on the serial port. If you fail to get a good calibration, look for a better-defined object and try again. The program will not start moving the stage until the object is centered, so if the stage doesn’t move as soon as you release the button, move the stage around with the joystick to better center the spot.
If you have trouble getting a good calibration, once you are in the ERROR state, carefully align the bright spot you are using so that it is centered according to the X and Y gradiant indicators on the LCD display. Then use a short press on @ to go back to IDLE, and try initiating the calibration processes again with the HOME button.
When you have succeeded, you can save the settings to flash. In the READY state hold down the HOME button for >8 sec. The saved info and a summary of the track parameters will be sent to the serial port. - You may wish to record the quad_order and cal_factor parameters somewhere so you could enter them directly using serial commands, should the controller ever be reset to its factory default values. (See the LOCK and LOCKRG commands.)
Calibration Factor
The cal_factor found is the above process is the servo gain factor determined from the test sample. The user may wish to increase or decrease this value depending upon tracking performance. Too high a value will result in nervous jerky tracking operation, too low a value will result in sluggish tracking and lost targets. Use LR X= cal_factor to change the parameter. The automated calibration process tends to give too low of a value for most effective tracking of fast moving targets.
Setup and Calibration Information
When learning how to operate the system, it is frequently useful to see all of the internally configured settings, background values, balance factors, etc. The command LR Z sends the current settings to the serial port to be displayed on a terminal screen. Sample output:
X+Y+:1 X+Y-:0 X-Y-:3 X-Y+:2 CAL FACTOR:14 QUAD_ORDER:78 QD BAL BKGND PMT CORR 0 35 36 79 1505 1 32 36 83 1504 2 32 34 81 1504 3 35 29 68 1365 Yplus:3008 Yminus:2870 Xplus:3009 Xminus:2869 Lock_range: 5.0000 Cal_range: 0.0400 Min_Sum_Sig: 100
TRACKING OPERATION
Control of the tracking operation is done with the buttons on the MS2000 controller. The @ button Handles most of the main functions. In general, a short press and release (<2 seconds) of the @ button will advance the tracking system to the next logical state. A long press and release (3-6 seconds) of the @ button will take you back to the previous state. Use the “TRACKING MODULE STATE-MACHINE NAVIGATION GUIDE” below for as a reference when getting familiar with the system.
Typical Tracking
Here is the procedure for locking and tracking a moving sample organism:
- Set up the fluorescent illumination, apertures, and PMT gain as desired and turn on the PMT. (Quadrant balance and gain calibration should have been done already.)
- From the IDLE state, grab the background by first closing off the light to the PMT and then pressing the @ button for <2 seconds to advance to the MONITOR state.
- Again, press the @ button for <2 seconds to advance to the READY state.
- Locate the target organism with the low-magnification spotting camera. Use the joystick to navigate with the stage to bring the organism to the center of the field of view.
- When the target object is close to centered with the joystick, press and release the JOYSTICK button to engage the servo TRACK mode lock. The joystick will become non-functional and the tracking system will attempt to follow the fluorescent organism.
- If you lose lock or something goes wrong, press and release the JOYSTICK button again to unlock and return to the READY state. The joystick will now be active again.
Tracking Mode Considerations
Joystick
The joystick speed switch is usually a short (<2 sec.) press of the joystick button. When in the READY or TRACK state, a short press of the joystick button is used to lock and unlock the tracking system. The joystick speed switching function requires a long (3-6 sec.) button press.
XY Range Limits
The tracking system has built-in XY range limits that can be set with the LKRANGE command. The range limit is defined as a distance from the position when the track lock was initiated. If the range limit is encountered, tracking is stopped and motion is halted and system returns to the READY state. The default value of the range limit is 5mm.
Displayed Signal Levels
The level of the raw and background corrected signals on the LCD display have a maximum range of about 1000. If the light intensity on the PMT increases much beyond the display limit, the protection circuitry on the PMT will activate and shut off the HV supply to the PMT to protect it from overexposure. In the READY or TRACK modes, the SUM signal on the LCD gives a good indication of the overall signal strength. Sum signals greater than 3200 are displayed as “8888” to indicate near the overexposure limit. Sum signals less than sum_min are not considered large enough to attempt tracking. During tracking, if the signal level drops below sum_min, the system reverts to the PAUSE state, until the signal level is again adequate for tracking. (The sum_min value can be set with the LOCK command.)
Obtaining the Tracking Path
The firmware can asynchronously send position information to the serial port. Please see the RT and TTL for details. The RT command allows the user to set the reporting time interval down to a minimum of every 20ms. The TTL command sets up the initiation of the serial stream with a TTL pulse input using TTL X=5. Once set up, a TTL pulse will toggle the reporting data stream on or off. The “RM” command, without arguments will do the same thing. Without specialized software to accept the data, the user can use their Serial Terminals's file capture facility to acquire the streaming serial data.
TROUBLESHOOTING
Problem: When lost, the stage takes off in one direction.
Solution: The tracker is not properly balanced. Go through the Adjusting Quadrant Balance procedure again.
Problem: The tracker will not lock; the stage moves in circles when you try.
Solution: The quadrant order is incorrect. Use the procedure described above to find the correct quadrant order. Valid order quadrant order codes are:
27 198 177 108 (PMT on a non-reflected port)
57 78 147 228 (PMT on a reflected port)
Problem: Tracker has a hard time hanging onto the spot of fast moving organisms. Solution:
- Adjust the sizes of the PMT and excitation apertures so that the fluorescently labeled tracking target can be separated from distracting fluorescent objects. Use as large apertures as possible while still meeting this goal.
- Increase the tracking system gain as much as possible without causing unstable operation. (Use the “LR X=n” command.)
Performance
The following step response performance tests were done using a stage with 12.7mm pitch lead screws (top speed 13mm/sec) on a RAMM /MIM system. The target objects were auto-fluorescent pollen grains, imaged with a 40X objective in epi-fluorescence mode. Typical tests involved first locking onto a fluorescent particle, then setting the coordinates of the locked system to 0,0,0. Then the system was unlocked, and moved a fixed distance from center – in most cases 80µm to the edge of the camera FOV. Buffers were cleared, then the LK command entered to activate tracking. The system immediately moves the stage to center the object. The optical error signals and position information is saved in the DU buffer so the dynamics of the process can be observed.


The data show the stage position and optical error dynamics as the stage is pulled to position. One of the major dynamic parameters is the overall gain of the closed loop system. That parameters is set with the LR X=n command. The data show results for various gain values. Lower gain is characterized by slower stage movement in response to the optical error. Higher gain is characterized by significant overshoot. For a feedback system, any delay in the error sensing signal path will significantly limit the frequency response of the total system. A careful analysis of the position record and the optical error record indicates that there is approximately a 3.5ms delay in the optical feedback collection path. This delay is due primarily to signal integration in the PMT (2.2ms), averaging of the digitized signal (0.3 ms), and controller processing latency (0.6ms). The phasing problem associated with this delay becomes clear when the stage position is plotted against the optical error signal, below for the high gain case where the oscillations of the two signals become a spiral toward the origin.

One approach to improving the dynamics without reducing the overall loop gain is to add in a “derivative of the error” term to the motor drive. Derivatives tend to be forward looking, so used appropriately; derivative terms can reduce overshoots while maintaining gain.

The chart above starts with the high-gain case with LR X=22 and then adds increasing amounts of derivative feedback. Notice that the initial rise time of the motion remains unchanged and rapid, consistent with the high gain value used. Increasing amounts of the derivative term reduce the level of overshoot and also increase the natural frequency response of the system.
In practice, it is hard to tune the servo parameters for optimum performance dealing with real world samples. Background correction can have a lot to do with the level of actual gain seen by the system. Best contrast is obtained by exactly subtracting all background light except for what is truly signal. The optical error is obtained by subtracting detector halves and normalizing to the sum signal. For this reason, the gradients calculated – and hence the motion loop gain – will depend upon the exact level of background subtracted.
For best results, develop a procedure that works well for you and do it the same every time. The play with the loop gain until you find a value that give good results but does not result in oscillation. If you need the added speed – go for broke and push the gain till almost oscillating and add the KD term. Expect it to be picky!
| TRACKING MODULE STATE-MACHINE NAVIGATION GUIDE | |||||
|---|---|---|---|---|---|
| State | LCD char | Next State @ button short (<2 sec) “LK” | Previous State @ button long(3-5 sec)“LK X” | Special Function HOME button longest (>8 sec) “LK Y” | Comment |
| IDLE | I | Grabs background MONITOR | CALIBRATE (force recalibration) | Display shows RAW SIGNALS. Block light to grab background when advancing to MONITOR state. | |
| MONITOR | M | READY | IDLE | BALANCE (force rebalance) | Display shows BACKGOUND CORRECTED SIGNALS. With background subtracted, find sample and refine PMT level. If you have to turn the PMT up too much, return to IDLE and re-grab background. |
| READY | R | lock TRACKING | MONITOR | Saves Settings | Ready state – Display show Xerror, Yerror, & Sum. Short press of Joystick button will lock. |
| TRACKING | T | lock Z-TRACK | unlock READY | Joystick disabled – active tracking. Display show Xerror, Yerror, & Sum. Short press of joystick button will unlock. | |
| Z-TRACK | t | TRACKING | unlock READY | Use the @ button to enable Z-tracking once XY tracking commences. | |
| TRACKING XY LIMIT | L | Encountered edge of track range. Motion in limit direction stop. Can recover. | |||
| TRACKING Z LIMIT | l | Encountered Z-lock-range limit. Will recover if possible. | |||
| PAUSE | P | unlock READY | unlock READY | Joystick enabled – low signal – will revert to TRACKING if signal increases.Display show Xerror, Yerror, & Sum. | |
| BALANCE | B | READY | MONITOR | Use with a flat illumination field – PMT and apertures at operating settings – to correct for net quadrant gain differences | |
| CALIBRATE | C | Background set to zero. IDLE | Move test spot to center of PMT with at least 80 Sum signal. Will automatically determine orientation of PMT and motion calibration constant and send you to either READY or ERROR state. Display show Xerror, Yerror, & Sum. | ||
| ERROR | E | IDLE | CALIBRATE | Unsuccessful calibration. Display show Xerror, Yerror, & Sum. | |
* Serial Command performs same action as button press.
Serial Commands to set Tracking parameters
Below are serial commands related to Phototrack system ,