Phototrack Tracking Theory
Tracking laterally in XY with a quadrant photo-detector is a well established method that allows for rapid course correction without requiring digital image collection and processing. Such a tracking system images a bright emissive target onto a four-pixel quadrant detector. X and Y corrections are determined from the signal difference from X and Y detector pixel pairs. Achieving zero error difference between the adjacent pixel pairs that determine the X and Y tracking errors does not completely determine the relative signal levels on the four detector pixels. The relative levels of diagonal pixels remain undetermined. Figure 1 shows the signal contributions for the X and Y tracking error terms and the undetermined diagonal pixel balance.

The tracking error contributions can be defined by the following four equations which are uniquely determined from the signal values, A, B, C, and D on the four pixels.
\begin{equation}X_{err}=\frac{(A +C)- (B+D)}{SUM} \tag{1} \end{equation}
\begin{equation}Y_{err}=\frac{(A +B)- (C+D)}{SUM} \tag{2} \end{equation}
\begin{equation}DIAG_{err}=\frac{(A +D)- (B+C)}{SUM} \tag{3} \end{equation}
\begin{equation}SUM=A+B+C+D \tag{4} \end{equation}
For standard XY tracking, the DIAGerr equation is ignored. Nevertheless, the presence of the third equation suggests that more information than just the X and Y tracking errors can be determined from the four pixel device.
In microscopy applications there is always the need to maintain focus. This is especially true when tracking moving organisms in the XY plane. If we wish to utilize the 4-pixel detector for tracking in Z as well as X and Y, then we are required to provide an optical signal that transitions from appearing mostly on one pair of diagonal pixel elements to the appearing mostly on the opposite diagonal pair as the target moves through “best focus”. This will allow us to use the DIAGerr equation as the Z-axis focus error.
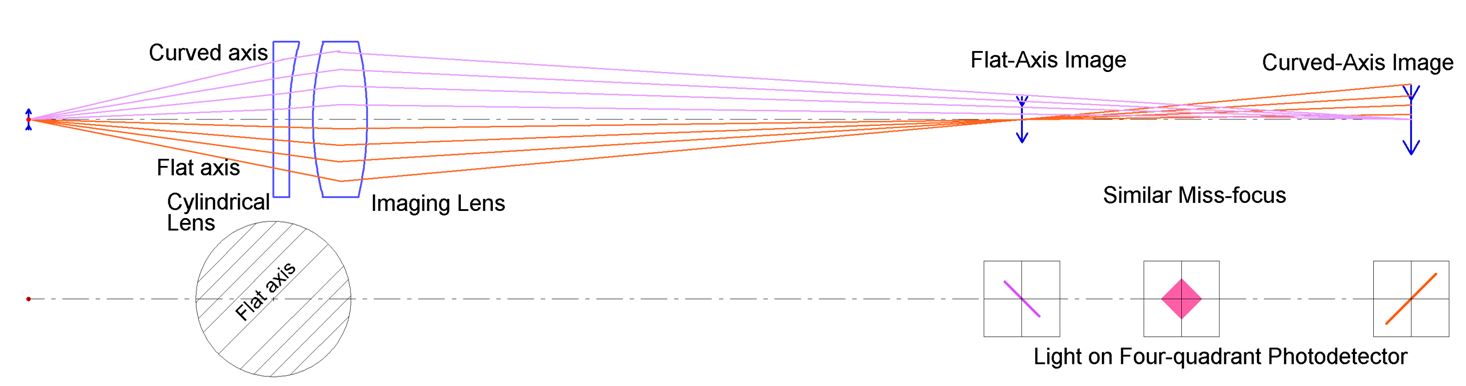
Astigmatism generated by a cylindrical lens can be used to generate the optical effect that is required for Z tracking with a four-pixel detector. Figure 2 below illustrates the basic principle for using astigmatism to provide information that can be used to maintain focus using the diagonal quadrants of the photo-detector. A negative cylindrical lens placed in proximity to the tube lens that forms the image of the bright tracking spot on the quadrant detector. Along the flat axis of the cylindrical lens there is no effect on the focus, so the tracking spot is in focus at the usual image plane of the tube lens. Along the curved axis of the cylindrical lens, the equivalent focal length of the lens pair will be approximately determined by the series lens equation:
\begin{equation} {1 \over F_{Comb}} ={1 \over F_{Tube}} + {1 \over F_{Cyl}} \tag{5} \end{equation}
The negative focal-length cylindrical lens will place the focus further back from the usual image plane of the tube lens. Roughly midway between the flat-axis focus and the curved-axis focus of the lens pair system will be a point where both axes are similarly miss-focused.
This is the design-location for the four-pixel photo detector is fixed at one location and the relative position of the sample moves in and out of focus with respect to the imaging lens. To complete the picture we need to understand how a change in the axial focus at the sample is transformed to an axial change in focus near the image.

For an ideal thin lens, the focal points f1 and f2 are constrained by the lens focal length, fl.
\begin{equation} fl ={1 \over f_1} + {1 \over f_2} \tag{6} \end{equation}
A small change in focus, d¬1 « f1, on one side causes a focus shift on the other side such that
\begin{equation} \frac{d_2}{d_1} = \frac{f_2^2}{f_1^2}=M^2 \tag{7} \end{equation}
where \begin{equation}M = {f_2 \over f_1}\end{equation} is the magnification of the lens. The axial displacement in focus position just depends on the magnification of the optical system squared. Based upon the overall system magnification, one can make a judicious choice of cylindrical lens focal length such that the separation of the two axes’ focal points can be translated into the focal range for the system at the sample. Hence, the light on the photo-detector will change from one diagonal to the opposite diagonal as the image spot changes axial focus by an amount
\begin{equation} d_r=\frac{F_{Comb}- F_{Tube}}{M^2} \tag{8}\end{equation}
The distance dr is the intrinsic range over which the focus system will operate most effectively and will the range of maximum diagonal pair difference-of-intensity.
In Figure 2 we see that at the desired photo-detector location, the source point has spread into a square blob. Normal tracking targets are not point sources, so there will remain some shape structure of the original source at the position of the detector. Any shape that is not perfectly round could therefore place more light on one set of diagonal elements than on the other, depending on its orientation. This would give rise to closed loop focus errors so it is best to avoid. Little shape information would remain at the photo-detector if the apparent size of the source object was much smaller than the out-of-focus blur at the photo-detector position. This requirement can be expressed as
\begin{equation} d_{source}< \frac{NA_{Obj}}{n_i} \frac{F_{Comb}-F_{Tube}}{2 M^2} = \frac{NA_{Obj}}{n_i} \frac{d_r}{2} \tag{9}\end{equation}
where NAObj is the numerical aperture of the objective lens and ni is the refractive index of the immersion medium. The table below gives a few examples of the relevant parameters for various objective lenses, tube lens and cylindrical lens focal lengths.
| Objective Magnification | Objective NA | PMT Tube lens F.L. (mm) | Cylindrical lens F.L. (mm) | Focus range(µm) | Max source size (µm) | C-mount Extension (mm) |
|---|---|---|---|---|---|---|
| 100 | 1.4 | 200 | -400 | 7.5 | 9.2 | 67 |
| 60 | 1.4 | 200 | -1000 | 10 | 10 | 22 |
| 40 | 1.3 | 200 | -400 | 47 | 53 | 67 |
| 40 | 0.95 | 100 | -200 | 44 | 48 | 33 |
| 20 | 0.75 | 200 | -1000 | 90 | 75 | 22 |